Robocon 2022: Lagori (同创辉煌)
Published:
National Runner-up (First Prize) in the ROBOCON 2022 China National Contest. Responsible for the visual perception algorithms for the logistic robots. Demo

Published:
National Runner-up (First Prize) in the ROBOCON 2022 China National Contest. Responsible for the visual perception algorithms for the logistic robots. Demo
Published:
National First Prize (Spark Award) in the ROBOCON 2023 China National Contest. Responsible for the volleyball’s target detection and trajectory prediction algorithms. Demo
Published:
A VIO system for panoramic cameras based on a geometrically consistent multi-prism projection model.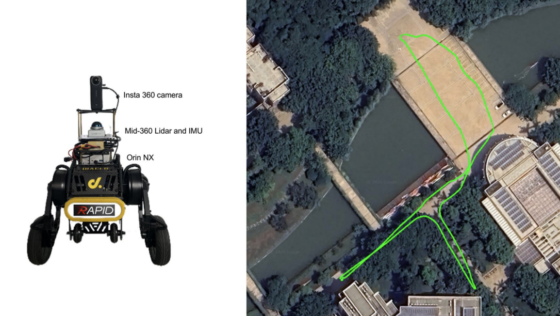
Published:
A target-free, mapping-free framework for joint spatiotemporal calibration of omnidirectional camera, IMU, and LiDAR systems.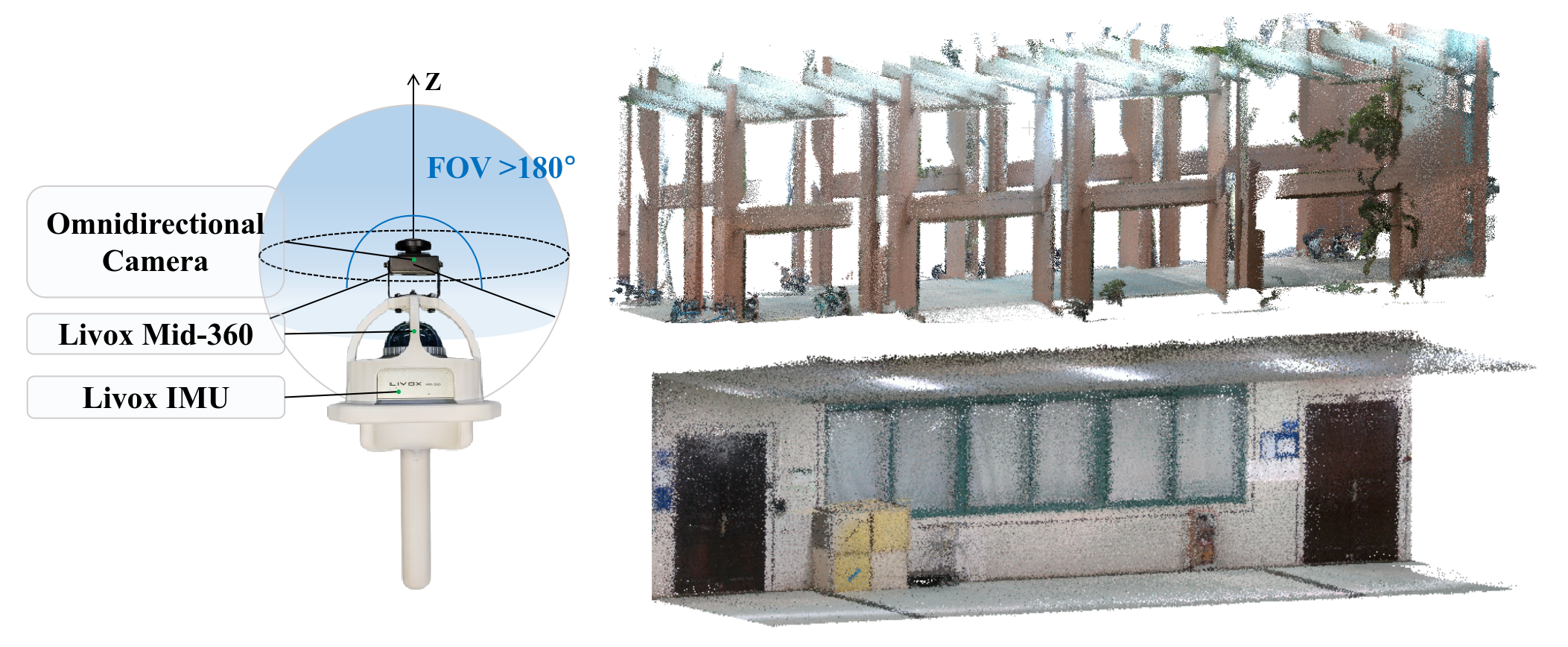
Published in Satellite Navigation, 2025
Use Google Scholar for full citation
Recommended citation: Ruidong Mei, Yihan Tu, Lanxiang Zheng, MingXin Wei, Hui Cheng, "Geotri-VIO: geometrically consistent multi-prism projection for panoramic imaging in visual-inertial-odometry." Satellite Navigation, 2025.
Download Paper
Published in IEEE Robotics and Automation Letters, 2026
This paper presents OmniVIL-Calib, a target-free, mapping-free framework for joint spatiotemporal calibration of omnidirectional camera, IMU, and LiDAR systems.
Recommended citation: Yihan Tu, Ruidong Mei, Hui Cheng, "OmniVIL-Calib: Target-Free Joint Calibration for Omnidirectional Camera, IMU, and LiDAR," IEEE Robotics and Automation Letters, vol. 11, no. 4, pp. 4187-4194, April 2026.
Download Paper
Published:
This is a description of your talk, which is a markdown file that can be all markdown-ified like any other post. Yay markdown!
Published:
This is a description of your conference proceedings talk, note the different field in type. You can put anything in this field.
Undergraduate course, University 1, Department, 2014
This is a description of a teaching experience. You can use markdown like any other post.
Workshop, University 1, Department, 2015
This is a description of a teaching experience. You can use markdown like any other post.