CV
Yihan Tu (Ethan)
Summary
Currently employed at Red Brick University. Short biography for the left-hand sidebar
Education
- Ph.D in Version Control Theory2018GitHub University
- M.S. in Jekyll2014GitHub University
- B.S. in GitHub2012GitHub University
Publications
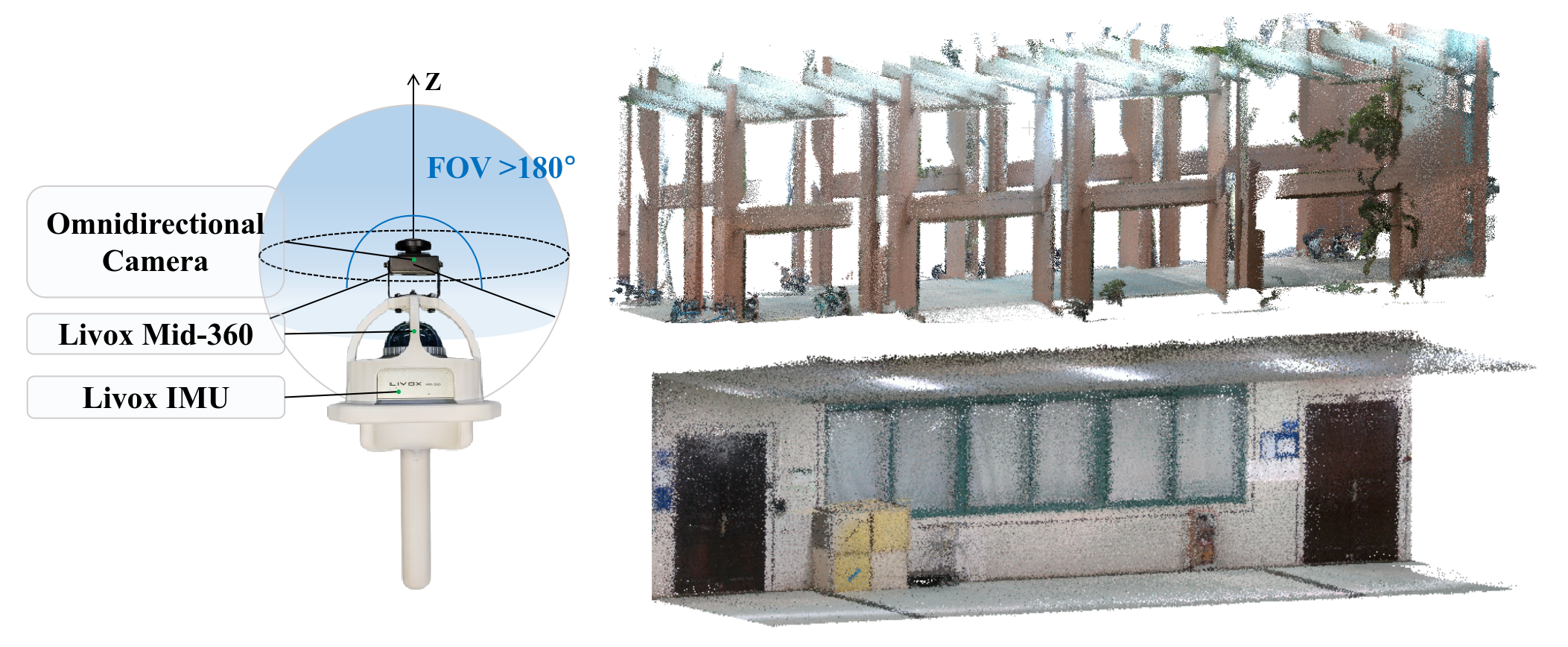
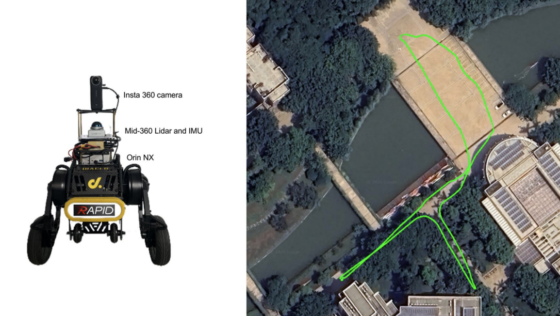
- OmniVIL-Calib: Target-Free Joint Calibration for Omnidirectional Camera, IMU, and LiDAR2026IEEE Robotics and Automation LettersA target-free, mapping-free framework for joint spatiotemporal calibration of omnidirectional camera, IMU, and LiDAR systems.
- Geotri-VIO: geometrically consistent multi-prism projection for panoramic imaging in visual-inertial-odometry2025Satellite NavigationA novel visual-inertial odometry system using panoramic imaging with geometrically consistent multi-prism projection.
Portfolio
- OmniVIL-Calib: 全向相机-IMU-激光雷达联合标定2026
- Geotri-VIO: 全景视觉惯性里程计2025
- Robocon 2023: Volleyball Challenge (排球挑战赛)2023
- Robocon 2022: Lagori (同创辉煌)2022